Match code to model
- In general, try to make the static code structure map 1-1 to a
statechart diagram representation.
- Research question: Structure
code so that a statechart diagram can be produced automatically
from code file?
Construct complete state handlers.
- This means not delegating state transitions to function calls, rather keep
transitions explicitly in the main case block of the
handler.
- Code solution to avoid:
QSTATE MyHsm::stateAB (QEvent const * e)
{
switch
{
...
case MYSIG1_SIG:
onMySig1(); // hides state transition
return 0;
...
}
return (QSTATE)&MyHsm::stateA;
}
void MyHsm::onMySig1()
{
if (myA && !myB && myC > 0 ...)
{
Q_TRAN(&MyHsm::stateB);
}
}
better code solution:
QSTATE MyHsm::stateAB (QEvent const * e)
{
switch
{
...
case MYSIG1_SIG:
if (sig1Guard())
{
Q_TRAN(&MyHsm::stateB);
}
return 0;
...
}
return (QSTATE)&MyHsm::stateA;
}
int MyHsm::sig1Guard()
{
if (myA && !myB && myC > 0 ...)
{
return 1;
}
return 0;
}
Keep HSM topology static
- It's possible to inadvertantly introduce dynamic topology with code
- code that changes transition target at runtime:
QSTATE MyHsm::stateAB (QEvent const * e)
{
switch
{
...
case MYSIG1_SIG:
Q_TRAN((...) ? (QState)stateB : (QState)stateC); // NO!
return 0;
...
}
return (QSTATE)&MyHsm::stateA;
}
static (compile time) determination of target:
QSTATE MyHsm::stateAB (QEvent const * e)
{
switch
{
...
case MYSIG1_SIG:
if (...)
Q_TRAN(stateB);
else
Q_TRAN(stateC);
return 0;
...
}
return (QSTATE)&MyHsm::stateA;
}
Choose "right" signal granularity
- Too fine -- repeated signal handling code
- Possible fixes:
- Combine signals into one type
- Define superstate to handle at higher level
- Too coarse -- many guard conditions
- Possible fixes:
- Expand/subdivide signals
- Define substates to handle some at lower level, keep others at
higher level
- DON'T delegate handling, keep state handlers complete
Allow active composit states
- Relax the UML rule requiring a composit state to have at least one active substate:
- Satisfies rule
- Breaks rule - better solution
|
|

Inside The Event Processor
| Assumptions | : |
Enforced by DBC where possible |
| The Is In State Query | : |
int QHsm::isIn(QState state) |
| Initializing the HSM | : |
void QHsm::init(QEvent const *e) |
| Dispatching Events | : |
void QHsm::dispatch(QEvent const *e) |
| Dynamic Transitions | : |
void QHsm::tran(QState target) |
| Static Transitions | : |
void QHsm::tranStat(Tran * tran, QState target) |
| The Transition Path | : |
void QHsm::tranSetup(Tran * tran, QState target) |
|
Assumptions
- Initial transitions must go one level deep
- Cannot transition to top state
- Static State Machine Topology (see Transition to History Pattern)
- One more signal, for internal use only:
enum
{
Q_EMPTY_SIG = 0 // internal server signal
};
(in addition to those for client program use:)
enum // standard signals - for use by clients
{
Q_INIT_SIG = 1,
Q_ENTRY_SIG,
Q_EXIT_SIG,
Q_USER_SIG
};
- Externally allocated standard events
extern QEvent const pkgStdEvt[]; // preallocated standard events
The Is In State Query
- Uses handling of empty signal as probe for parent state
#define TRIGGER(state_, sig_) \
Q_STATE_CAST((this->*(state_))(&pkgStdEvt[sig_]))
int QHsm::isIn(QState state)
{
register QState s;
for (s = myState; s != 0; s = TRIGGER(s, Q_EMPTY_SIG))
{
if (s == state) // do the states match?
{
return !0; // match found, return true
}
}
return 0; // no match found, return false
}
Initializing the HSM
- Constructor initializes myState = top and mySource = initial
- Machine initialized in separate method init()
- Make initial transition to child (direct) substate; enforces direct
substate constraint
- Loop: calls the state handler with the reserved
signal Q_ENTRY_SIG, continuing as long as event is handled,
enforcing the direct substate constraint at each step
- Direct substate constraint does not prevent initialization from
descending as deep as desired; it just makes it happen one level at a time
- Note all the design by contract checks
- initial() must be implemented by derived class (specific HSM)
- init() must be called (via the macro Q_INIT)
- in the (required) implementation of the initial handler initial
- in any handlers that handle the Q_INIT_SIG signal
QHsm::QHsm(QPseudoState initial)
: myState(&QHsm::top), mySource(Q_STATE_CAST(initial))
{}
void QHsm::init(QEvent const *e)
{
REQUIRE(myState == &QHsm::top && // HSM not executed yet
mySource != 0); // we are about to dereference mySource
register QState s = myState; // save myState in a temporary
(this->*(QPseudoState)mySource)(e); // top-most initial transition
// initial transition must go *one* level deep
ASSERT(s == TRIGGER(myState, Q_EMPTY_SIG));
s = myState; // update the temporary
TRIGGER(s, Q_ENTRY_SIG); // enter the state
while (TRIGGER(s, Q_INIT_SIG) == 0) // init handled?
{
// initial transition must go *one* level deep
ASSERT(s == TRIGGER(myState, Q_EMPTY_SIG));
s = myState;
TRIGGER(s, Q_ENTRY_SIG); // enter the substate
}
}
Dispatching Events
- Climbs the state hierarchy until a state handler returns 0
- The handler that returns 0 is the one that actually handles the event
- Note that during this last call to a handler, mySource is the state from which the transition
occurs. (Is there a DBC mechanism to guarantee this? It depends on
client program making topologically correct returns from state handlers.)
void QHsm::dispatch(QEvent const *e)
{
for (mySource = myState; mySource != 0;
mySource = Q_STATE_CAST((this->*mySource)(e)))
{}
}
Dynamic Transitions
- tran() call made via macro:
#define Q_TRAN_DYN(target_) tran(Q_STATIC_CAST(QState, target_))
tran()Implementation Plan:
- Note that call is made from dispatch() by handler of source state, so
mySource is correct
- Ascend from myState to mySource, invoking exit actions
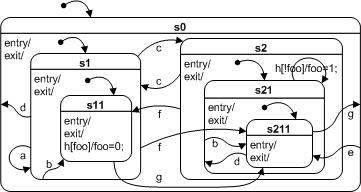
- Take cases (a) - (g) as an optimization, seeking LCA and path from target to
LCA
- Use TRIGGER(s, Q_EMPTY_SIG) to elicit superstate info
- Descend path to target, invoking entry actions
-
Transition Illustration
-
Transition Illustration Detail
-
Case Illustrations
void QHsm::tran(QState target)
{
REQUIRE(target != &QHsm::top); // cannot target "top" state
QState entry[7], p, q, s, *e, *lca;
for (s = myState; s != mySource; )
{
ASSERT(s != 0); // we are about to dereference s
QState t = TRIGGER(s, Q_EXIT_SIG);
if (t != 0) // exit action unhandled, t points to superstate
{
s = t;
}
else // exit action handled, elicit superstate
{
s = TRIGGER(s, Q_EMPTY_SIG);
}
}
*(e = &entry[0]) = 0;
*(++e) = target; // assume entry to target
// (a) check mySource == target (transition to self)
if (mySource == target)
{
TRIGGER(mySource, Q_EXIT_SIG); // exit source
goto inLCA;
}
// (b) check mySource == target->super
p = TRIGGER(target, Q_EMPTY_SIG);
if (mySource == p)
{
goto inLCA;
}
// (c) check mySource->super == target->super (most common)
q = TRIGGER(mySource, Q_EMPTY_SIG);
if (q == p)
{
TRIGGER(mySource, Q_EXIT_SIG); // exit source
goto inLCA;
}
// (d) check mySource->super == target
if (q == target)
{
TRIGGER(mySource, Q_EXIT_SIG); // exit source
--e; // do not enter the LCA
goto inLCA;
}
// (e) check rest of mySource == target->super->super... hierarchy
*(++e) = p;
for (s = TRIGGER(p, Q_EMPTY_SIG); s != 0;
s = TRIGGER(s, Q_EMPTY_SIG))
{
if (mySource == s)
{
goto inLCA;
}
*(++e) = s;
}
TRIGGER(mySource, Q_EXIT_SIG); // exit source
// (f) check rest of mySource->super == target->super->super...
for (lca = e; *lca != 0; --lca)
{
if (q == *lca)
{
e = lca - 1; // do not enter the LCA
goto inLCA;
}
}
// (g) check each mySource->super->super..for each target...
for (s = q; s != 0; s = TRIGGER(s, Q_EMPTY_SIG))
{
for (lca = e; *lca != 0; --lca)
{
if (s == *lca)
{
e = lca - 1; // do not enter the LCA
goto inLCA;
}
}
TRIGGER(s, Q_EXIT_SIG); // exit s
}
ASSERT(0); // malformed HSM
inLCA: // now we are in the LCA of mySource and target
ASSERT(e < &entry[DIM(entry)]); // new entry e must fit in
while ((s = *e--) != 0) //retrace the entry path in reverse order
{
TRIGGER(s, Q_ENTRY_SIG); // enter s
}
myState = target; // update current state
while (TRIGGER(target, Q_INIT_SIG) == 0)
{
// initial transition must go *one* level deep
ASSERT(target == TRIGGER(myState, Q_EMPTY_SIG));
target = myState;
TRIGGER(target, Q_ENTRY_SIG); // enter target
}
}
Static Transitions
- tranStat() call made via macro:
#define Q_TRAN(target_) if (1)
{ \
static Tran t_; \
tranStat(&t_, Q_STATIC_CAST(QState, target_));\
}
else ((void)0)
Effect: substitute the code block
{
static Tran t_;
tranStat(&t_, Q_STATIC_CAST(QState, target_));
}
Note the subtlty: t_ is locally scoped in association with
the particular transition, yet it is a persistent (static) data item.
tranStat() implementation plan:
- Use algorithm implemented for tran() once for each transition
- Store transition path in static Tran t_ associated with transition
- Re-use transition path info
- Delegate transition path discovery to method tranSetup()
void QHsm::tranStat(Tran *tran, QState target)
{
REQUIRE(target != &QHsm::top); // cannot target "top" state
register QState s;
// ascend to mySource, invoking exit actions
for (s = myState; s != mySource; )
{
ASSERT(s != 0); // we are about to dereference s
QState t = TRIGGER(s, Q_EXIT_SIG);
if (t != 0) // exit action unhandled, t points to superstate
{
s = t;
}
else exit action handled, elicit superstate
{
s = TRIGGER(s, Q_EMPTY_SIG);
}
}
// check for transition object
if (tran->myActions == 0) // is the tran object initialized?
{
tranSetup(tran, target); // setup the transition object
}
// transition object initialized, execute transition chain
{
register QState *c = &tran->myChain[0];
register unsigned short a;
for (a = tran->myActions >> 1; a != 0; a >>= 2, ++c)
{
(this->*(*c))(&pkgStdEvt[a & 3]);
}
myState = *c;
}
}
The Transition Path
void QHsm::tranSetup(Tran *tran, QState target)
{
QState entry[DIM(tran->myChain)], p, q, s, *c, *e, *lca;
unsigned short a = 0;
#define RECORD(state_, sig_) \
if (TRIGGER(state_, sig_) == 0)\
{\
a |= ((sig_) << 14); \
a >>= 2; \
*c++ = (state_); \
}\
else ((void)0)
c = &tran->myChain[0];
*(e = &entry[0]) = 0;
*(++e) = target; // assume entry to target
// (a) check mySource == target (transition to self)
if (mySource == target)
{
RECORD(mySource, Q_EXIT_SIG); // exit source
goto inLCA;
}
// (b) check mySource == target->super
p = TRIGGER(target, Q_EMPTY_SIG);
if (mySource == p)
{
goto inLCA;
}
// (c) check mySource->super == target->super (most common)
q = TRIGGER(mySource, Q_EMPTY_SIG);
if (q == p)
{
RECORD(mySource, Q_EXIT_SIG); // exit source
goto inLCA;
}
// (d) check mySource->super == target
if (q == target)
{
RECORD(mySource, Q_EXIT_SIG); // exit source
--e; // do not enter the LCA
goto inLCA;
}
// (e) check rest of mySource == target->super->super... hierarchy
*(++e) = p;
for (s = TRIGGER(p, Q_EMPTY_SIG); s != 0;
s = TRIGGER(s, Q_EMPTY_SIG))
{
if (mySource == s)
{
goto inLCA;
}
*(++e) = s;
}
RECORD(mySource, Q_EXIT_SIG); // exit source
// (f) check rest of mySource->super == target->super->super...
for (lca = e; *lca != 0; --lca)
{
if (q == *lca)
{
e = lca - 1; // do not enter the LCA
goto inLCA;
}
}
// (g) check each mySource->super->super..for each target...
for (s = q; s != 0; s = TRIGGER(s, Q_EMPTY_SIG))
{
for (lca = e; *lca != 0; --lca)
{
if (s == *lca)
{
e = lca - 1; // do not enter the LCA
goto inLCA;
}
}
RECORD(s, Q_EXIT_SIG); // exit s
}
ASSERT(0); // malformed HSM
inLCA: // now we are in the LCA of mySource and target
ASSERT(e < &entry[DIM(entry)]); // new entry e must fit in
while ((s = *e--) != 0) //retrace the entry path in reverse order
{
RECORD(s, Q_ENTRY_SIG); // enter s
}
myState = target; // update current state
while (TRIGGER(target, Q_INIT_SIG) == 0)
{
// initial transition must go *one* level deep
ASSERT(target == TRIGGER(myState, Q_EMPTY_SIG));
a |= (Q_INIT_SIG << 14);
a >>= 2;
*c++ = target;
target = myState;
RECORD(target, Q_ENTRY_SIG); // enter target
}
#undef RECORD
*c = target;
tran->myActions = (a >> (13 - (c - &tran->myChain[0])*2)) & 0x1;
// transition initialized
ENSURE(tran->myChain[0] != 0 &&
c < &tran->myChain[DIM(tran->myChain)]); // check overflow
}
Review
- Assumptions/Limitations
- Initial transitions must go one level deep (DBC enforced)
- Cannot transition to top state (DBC enforced)
- Static State Machine Topology (NOT DBC enforced)
(see Transition to History Pattern)
- No Mealey transitions
- Event processor only, no execution environment
- Straightforward and logical to create client HSM application
- Client class: Derive MyHsm publicly from QHsm
provide implementation for initial() in top state
- States: Handler methods in class MyHsm derived from QHsm
- Transitions: Represented as case in source state handler, ending with
Q_TRAN(target); return 0;
- Superstates: Named in return statement ending handler
methods, as in
return (QSTATE)&MyHsm::superState;
- Entry, exit, and init actions: Handled as cases triggered by
reserve signals
Q_ENTRY_SIG, Q_EXIT_SIG, Q_INIT_SIG
- Easy to change HSM topology
- New state: Add new state handler to MyHsm
- New transition: Add case to state sourceState handler ending with Q_TRAN(targetState)
- Change target: Change argument of call Q_TRAN(target)
- Change superstate: Modify the return statement at end of
substate handler
- Good runtime efficiency and small memory footprint
- Internal dispatch = de-reference pointer-to-member (once for each step
up through state hierarchy to state that handles event)
- QHsm adds only two function pointers to memory footprint of client
- Pay only for what you use
- Static topology efficiency
- Add dynamic cases when needed (see Transition to History)

Notes
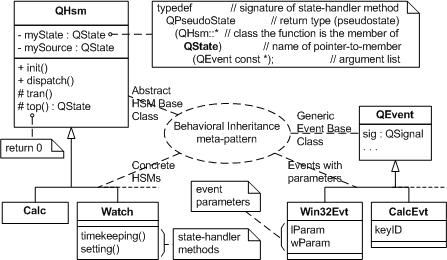
1. Definition of QPseudoState expanded for reading:
typedef // defining signature of pseudostate handler method
void // return type of method
(QHsm::* // class membership of method
QPseudoState // typename defined
)
(QEvent const*) // argument list
;
2. Definition of QState expanded for reading:
typedef // defining signature of state handler method
QPseudoState // return type of method
(QHsm::* // class membership of method
QState // typename defined
)
(QEvent const*) // argument list of method
;
3. State and Superstate
typedef QHsm::QPseudoState QSTATE; // state-handler return type
- State event handler returns the parent state as default case
- Minimal info required to construct state hierarchy
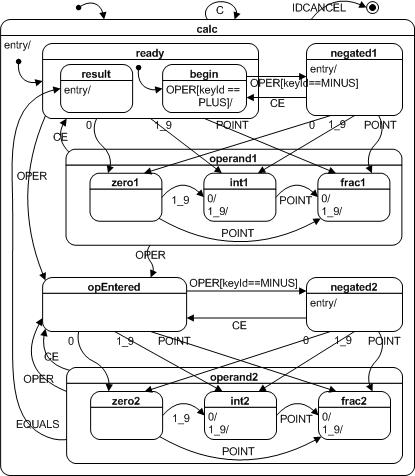
- Example from QCalc:
QSTATE Calc::operand1(QEvent const *e) // state-handler signature
{
switch (e->sig)
{
case Q_ENTRY_SIG: // handle entry-sig event (entry action)
dispState("operand1");
return 0;
case IDC_CE: // handle clear-entry event
clear();
Q_TRAN(&Calc::begin); // transition to "begin"
return 0;
case IDC_OPER: // handle operator-entered event
sscanf(myDisplay, "%lf", &myOperand1);
myOperator = (static_cast<CalcEvt *>(e))->keyId;
Q_TRAN(&Calc::opEntered); // transition to "opEntered"
return 0;
}
return (QSTATE)&Calc::calc; // event not handled, return parent state
}
4. Hierarchical event dispatching
void QHsm::dispatch(QEvent const *e)
{
for (mySource = myState; mySource != 0;
mySource = Q_STATE_CAST((this->*mySource)(e)))
{}
}
5. Class Tran
class Tran
{
public:
QState myChain[7];
unsigned short myActions; // action mask (2-bits for action)
};
- Records transition chain data for re-use during static transitions
- myChain records complete transition chain for a static transition
- myActions encodes signals to state handlers for transition chain
6. Protected constructor and destructor
- Public constructor must be defined in derived class (HSM instance)
- Forces derived class to define initial state handler
- Typically derived constructor will be "default" and call parent class constructor
- Example:
class QHsm
{
protected:
QHsm(QPseudoState initial);
// ...
};
class QHsmTst : public QHsm
{
public:
QHsmTst() : QHsm ((QPseudoState)initial) // default constructor
{}
// ...
};
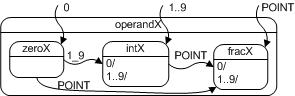
7. Events and Signals Example
QSTATE Calc::zero1(QEvent const *e) // state-handler signature
{
switch (e->sig)
{
case Q_ENTRY_SIG: // handle entry signal event (entry action)
dispState("zero1");
return 0;
case IDC_1_9: // handle digit(1..9) event
insert(static_cast<CalcEvt *>(e)->keyId);
Q_TRAN(&Calc::int1); // transition to "int1"
return 0;
case IDC_POINT: // handle "." event
insert(((CalcEvt *)e)->keyId);
Q_TRAN(&Calc::frac1); // transition to "frac1"
return 0;
}
return (QSTATE)&Calc::operand1; // event not handled, return parent state
}
8. Initial Transtion and Entry Action Example
QSTATE Calc::calc(QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG: // no state transition
dispState("calc");
return 0;
case Q_INIT_SIG: // transition to initial via Q_INIT()
clear();
Q_INIT(&Calc::ready);
return 0;
case IDC_C:
clear();
Q_TRAN(&Calc::calc);
return 0;
case TERMINATE:
Q_TRAN(&Calc::final);
return 0;
}
if (e->sig >= Q_USER_SIG) // a form of exception handling
{
isHandled = FALSE;
}
return (QSTATE)&Calc::top;
}
9. Initial transition for QCalc
void Calc::initial(QEvent const *)
{
clear();
Q_INIT(&Calc::calc);
}
|